
I am a first-year CS Ph.D. student at the School of Data Science, The Chinese University of Hong Kong, Shenzhen (CUHK-SZ), supervised by Prof. Kui Jia. I received my B.Eng. in Automation Engineering from Harbin Institute of Technology, Weihai (2021-2025). During my undergraduate studies, I conducted research at the Institute for AI Industry Research (AIR), Tsinghua University, and also worked as a research intern at DexForce Technology Co., Ltd.
My research interests lie in enabling intelligent systems to better perceive and interact with the physical world. In particular, I am interested in developing generalizable robotic manipulation policies, and exploring world models that support reliable and physically grounded decision-making.
Selected Publications
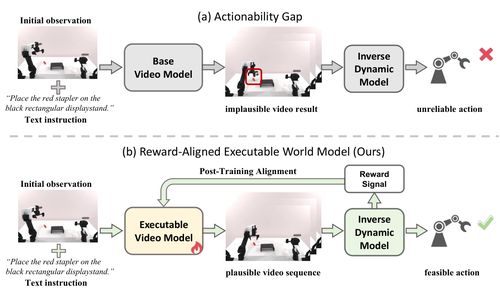
EVA: Aligning Video World Models with Executable Robot Actions via Inverse Dynamics Rewards
Ruixiang Wang, Qingming Liu, Yueci Deng, Guiliang Liu, Zhen Liu, Kui Jia
- A reward-aligned post-training framework that bridges visually plausible video rollouts and executable robot actions via inverse dynamics rewards.
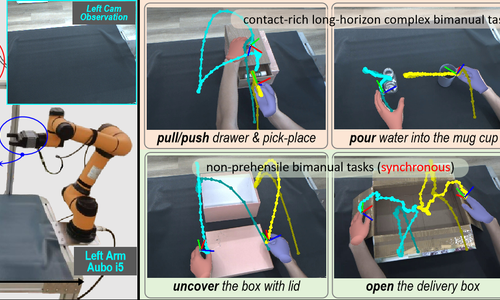
You Only Teach Once: Learn One-Shot Bimanual Robotic Manipulation from Video Demonstrations
Huayi Zhou, Ruixiang Wang, Yunxin Tai, Yueci Deng, Guiliang Liu, Kui Jia
- A one-shot framework that transfers bimanual hand motion patterns from human videos to dual-arm robots for long-horizon manipulation.
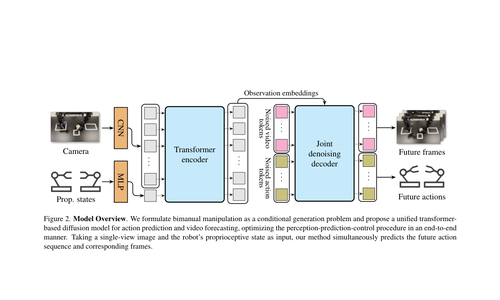
Diffusion-Based Imaginative Coordination for Bimanual Manipulation
Huilin Xu, Jian Ding, Jiakun Xu, Ruixiang Wang, Jun Chen, Jinjie Mai, Yanwei Fu, Bernard Ghanem, Feng Xu, Mohamed Elhoseiny
- A unified diffusion framework that jointly models action prediction and future video generation to improve bimanual coordination.
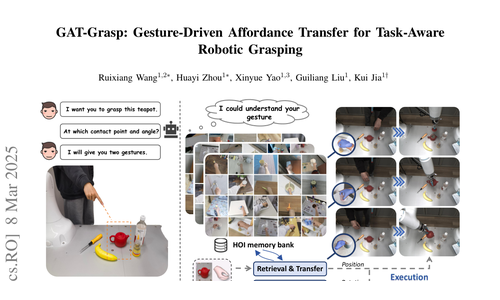
GAT-Grasp: Gesture-Driven Affordance Transfer for Task-Aware Robotic Grasping
Ruixiang Wang, Huayi Zhou, Xinyue Yao, Guiliang Liu, Kui Jia
- A gesture-driven affordance transfer framework that grounds task-aware grasp pose generation in human pointing and grasp gestures.
Experience
- 2025 - Present, PhD Student, The Chinese University of Hong Kong, Shenzhen.
- Oct. 2024 - 2025, Research Assistant, The Chinese University of Hong Kong, Shenzhen.
- Jul. 2024 - Sep. 2024, Summer Intern, Institute for AI Industry Research, Tsinghua University.
- Sep. 2022 - Jun. 2023, Core Member, UAV Innovation Lab, Harbin Institute of Technology.
Education
- 2025 - Present, PhD Student, The Chinese University of Hong Kong, Shenzhen.
- Sep. 2021 - May 2025, B.Eng. in Automation Engineering, Harbin Institute of Technology, Weihai. GPA: 91.39/100, 3.96/4.00.